Abstract
End-to-end autonomous driving (E2E-AD) in urban environments requires robust decision-making under partial observability and complex multi-agent interactions. Severe occlusions and dense traffic at intersections limit the perception capability of single-agent systems, motivating recent efforts on Vehicle-to-Infrastructure (V2I) cooperation for perception and planning. However, existing evaluation protocols face a fundamental trade-off: open-loop evaluation fails to capture error accumulation and recovery from deviations, while closed-loop evaluation is costly, difficult to scale, and often relies on simulated environments that may suffer from domain gaps.
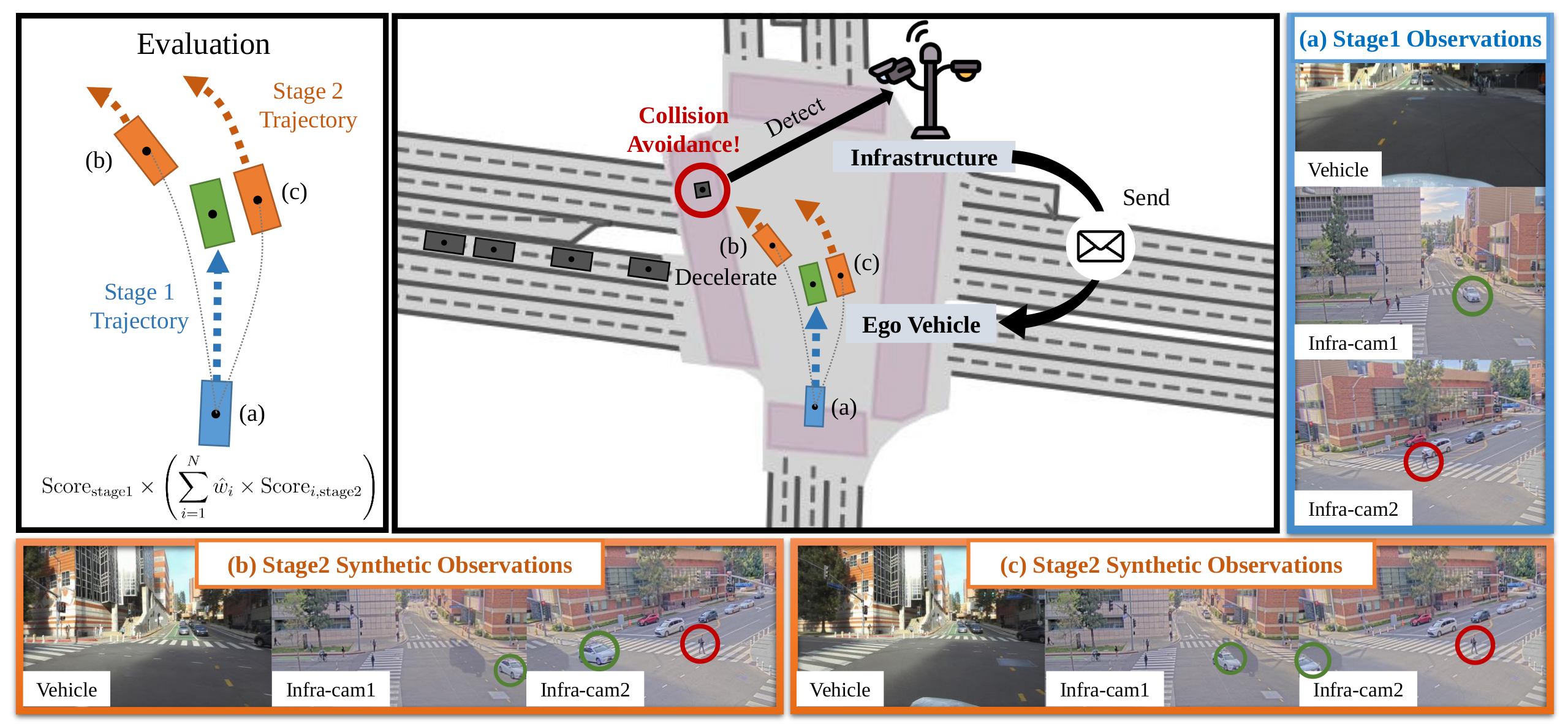
To bridge this gap, we propose VIPS, a benchmark for cooperative autonomous driving in V2I settings based on pseudo-simulation. VIPS extends pseudo-simulation to multi-agent scenarios by integrating vehicle and infrastructure observations and introducing interaction-aware perturbations that approximate realistic traffic dynamics. This enables scalable yet realistic evaluation of robustness and error propagation without full simulation. We further present CoS-V2X, a cooperative planning framework based on sparse representations. CoS-V2X models vehicle–infrastructure interactions using compact features for efficient communication and robust decision-making under heterogeneous observations. Code and dataset will be publicly available.
Contributions
- VIPS benchmark. We extend the two-stage pseudo-simulation paradigm to the Vehicle-to-Infrastructure (V2I) setting, integrating paired vehicle-side and infrastructure-side observations with interaction-aware perturbations, enabling scalable yet realistic evaluation of robustness and error propagation directly on real-world data.
- Map and novel-view annotations. We augment the V2X-Real dataset with manually annotated vector maps and a paired novel-view generation pipeline for both vehicle (3D Gaussian Splatting + diffusion refinement) and infrastructure (masking + inpainting) observations, supporting geometry-aware, planning-oriented evaluation.
- CoS-V2X framework. We propose a simple yet effective sparse, anchor-based cooperative planning framework that exchanges only a small set of informative instances, achieving the best overall performance while requiring lower communication bandwidth than dense BEV-based cooperative methods.
CoS-V2X Framework
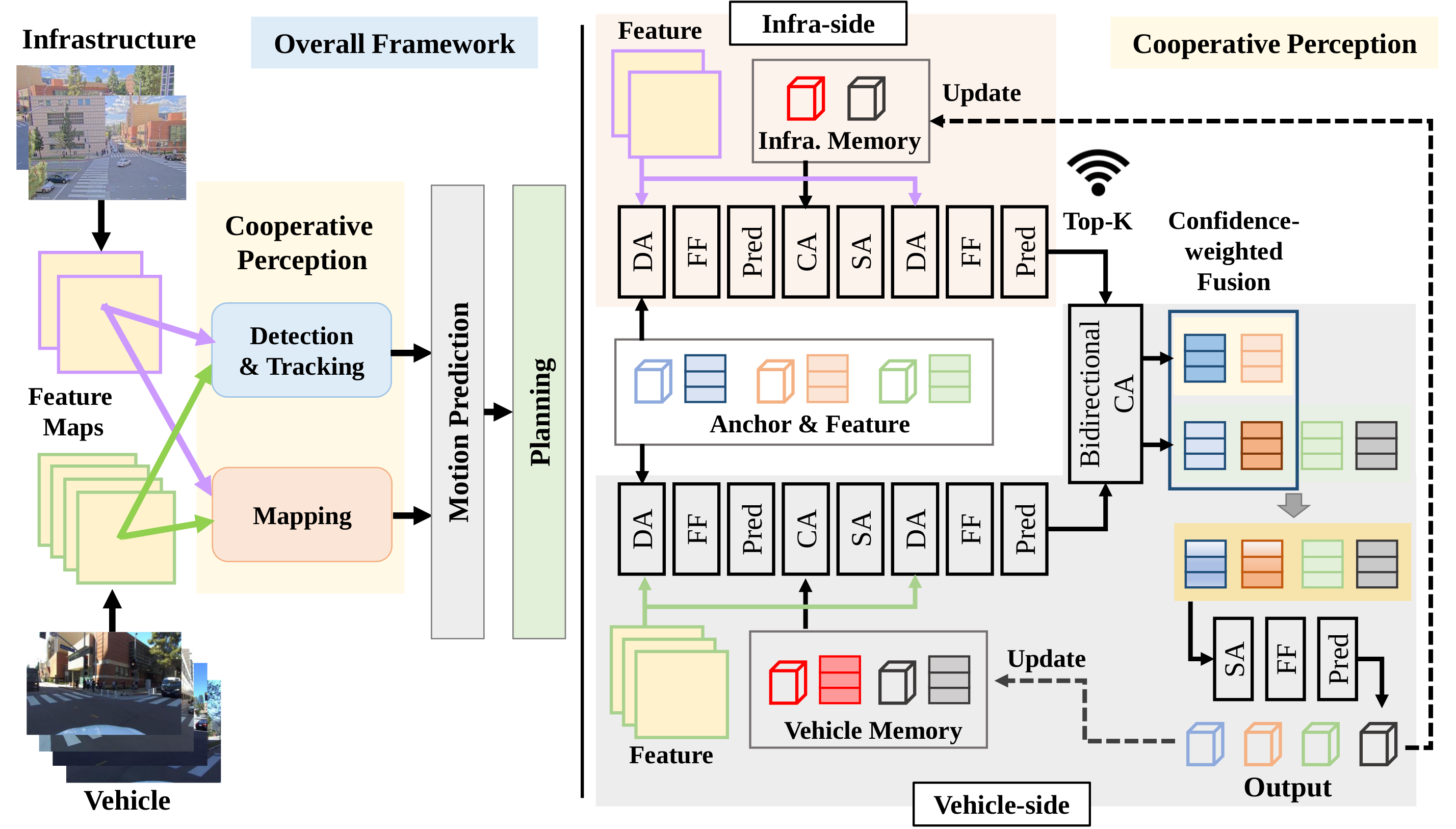
Overview of CoS-V2X. Left: the overall framework performs cooperative perception (3D detection and online mapping) through interaction between the infrastructure and the ego vehicle, followed by sequential motion prediction and planning. Right: the cooperative perception module uses a symmetric anchor-based design across agents. Only the top-K high-confidence infrastructure instances are transmitted, exchanged via bidirectional cross-attention, and merged with confidence-weighted fusion. This sparse representation reduces communication overhead while preserving robust cross-agent reasoning. (DA: Deformable Aggregation; FF: Feedforward Network; CA: Cross-Attention; SA: Self-Attention; Pred: regression and classification heads.)
Benchmark Construction
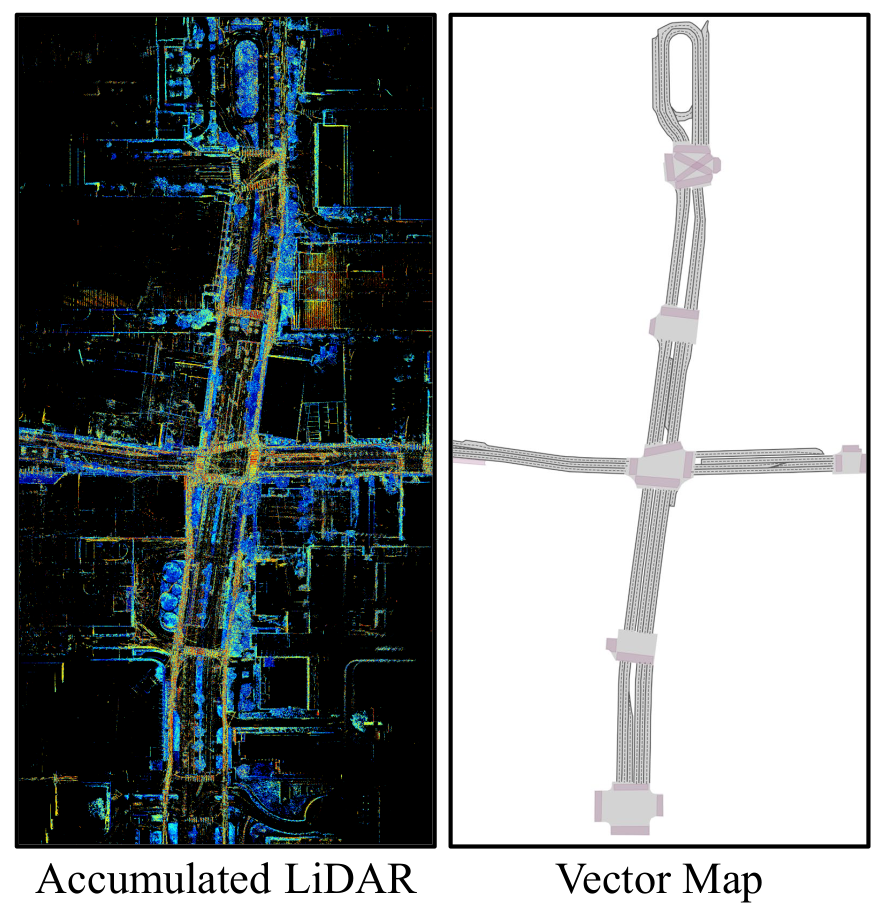
We accumulate LiDAR point clouds using ego poses and manually annotate vector maps for V2X-Real, enabling geometry-aware planning evaluation.
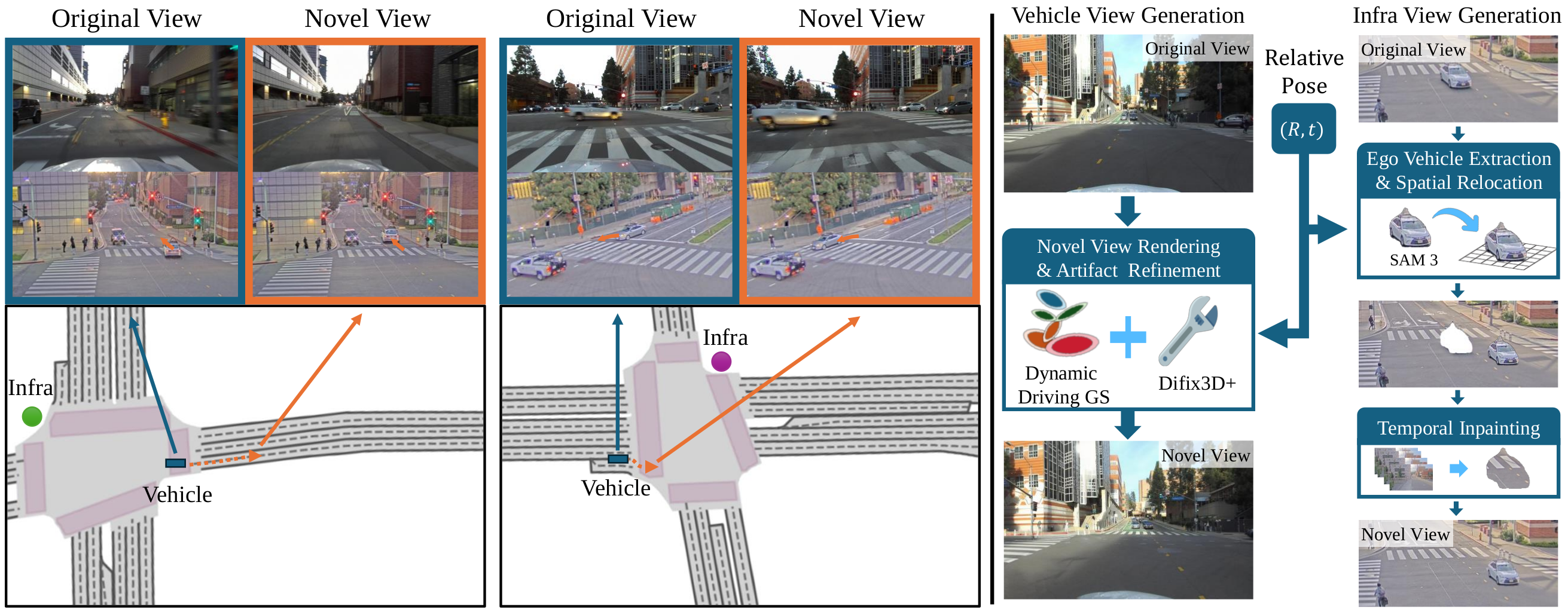
Given a virtual relocation of the ego vehicle, we synthesize paired novel views: vehicle views via 3D Gaussian Splatting with a render enhancer, and infrastructure views via masking and temporal inpainting.

Qualitative ablation of novel-view generation. For the fixed infrastructure camera, our masking-and-inpainting approach yields cleaner results than 3DGS, where objects appear small.
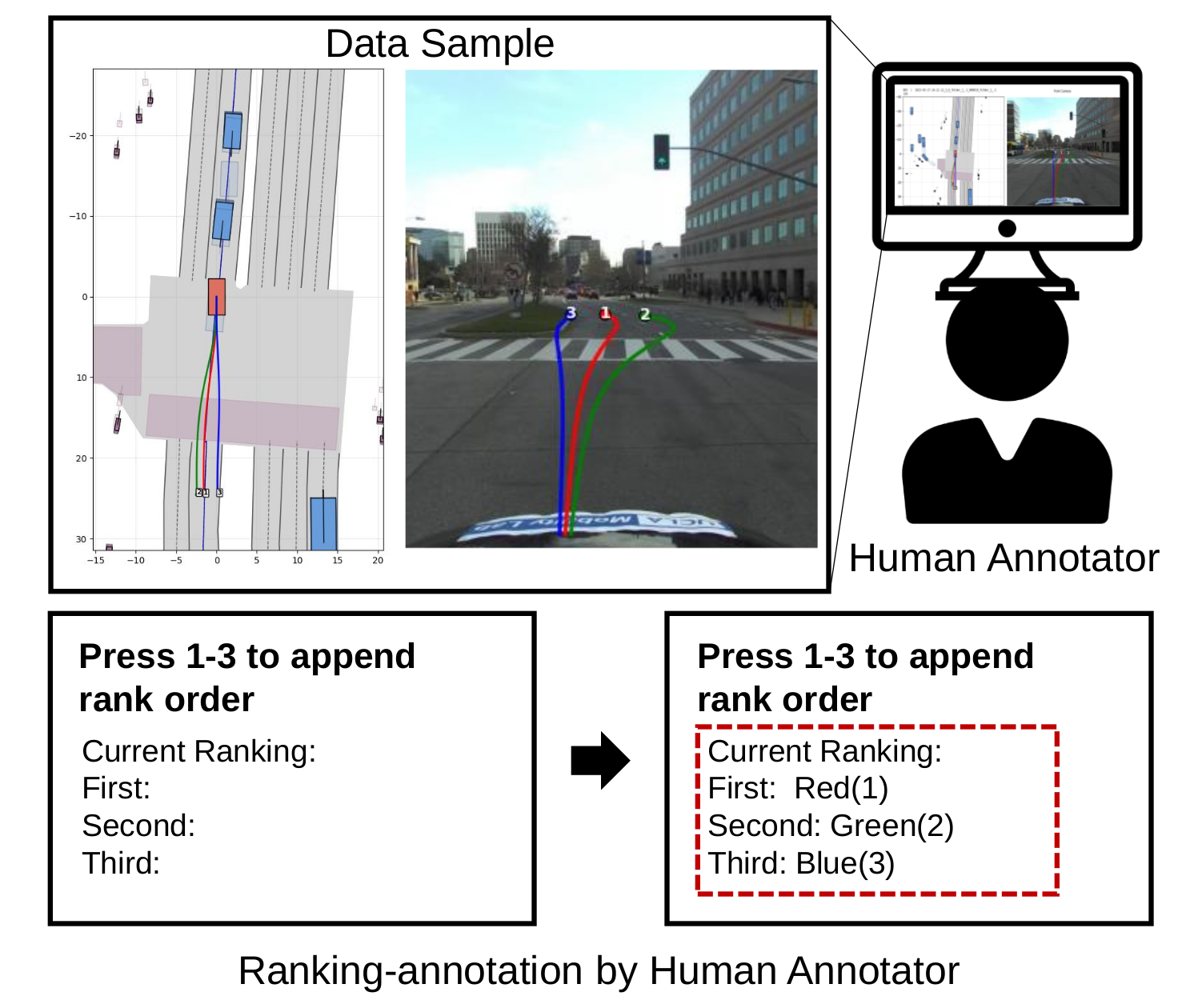
Human annotators rank candidate trajectories by driving quality, which we use to validate that the EPDMS-based metric aligns with human judgment.
BibTeX
The citation will be available once the paper is published.
Our Related Work
VR-Drive: Viewpoint-Robust End-to-End Driving with Feed-Forward 3D Gaussian Splatting (NeurIPS 2025). Hoonhee Cho*, Jae-Young Kang*, Giwon Lee*, Hyemin Yang*, Heejun Park, Seokwoo Jung, Kuk-Jin Yoon. A viewpoint-robust end-to-end driving framework that leverages feed-forward 3D Gaussian Splatting to synthesize novel views for robust planning — the basis on which VIPS builds its V2I pseudo-simulation. [Project] [arXiv] [Code]
HEAT: Heterogeneous End-to-End Autonomous Driving via Trajectory-Guided World Models (arXiv 2026). Hoonhee Cho*, Giwon Lee*, Jae-Young Kang*, Hyemin Yang*, Heejun Park*, Kuk-Jin Yoon†. A trajectory-driven learning paradigm with a world model that captures domain-invariant driving intent, enabling a single unified end-to-end model to perform robustly across heterogeneous domains (nuScenes, NAVSIM, Waymo). [arXiv]
*Equal Contribution †Corresponding Author